Planning, Accuracy and 3D sensing for full automation robotic welding.
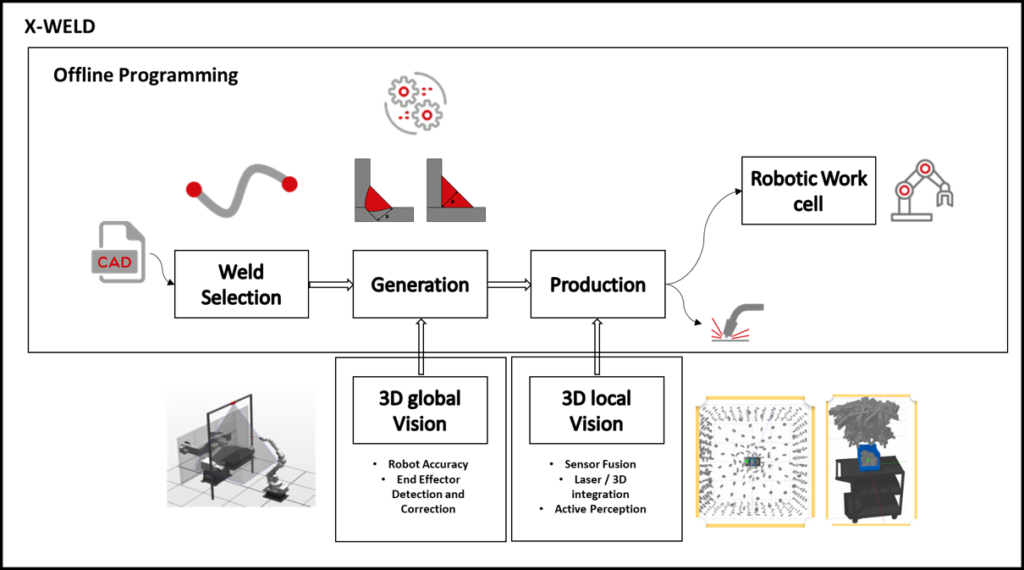
This demonstrator aims to develop a completely automated system for robotized welding through the combination of advanced (collision-free) offline programming, with advanced sensing for part localization and robot calibration.

SARKKIS Robotics continues its focus on the developing of the future of advanced robotic systems with the participation in TRINITY project consortium (Digital Technologies, Advanced Robotics and increased Cyber-security for Agile Production in Future European Manufacturing Ecosystems). The project focus is to create a network of multidisciplinary and synergistic local digital innovation hubs (DIHs) composed of research centers, companies, and university groups that cover a wide range of topics that can contribute to agile production: advanced robotics as the driving force and digital tools, data privacy and cyber security technologies to support the introduction of advanced robotic systems in the production processes
SARKKIS Robotics participates in the first demonstration program with X-Weld, which acronymous stands for Planning, Accuracy and 3D sensing for full automation robotic welding, together with NEADVANCE and INESC TEC. The final result of the project will be the X-Weld kit, which includes the offline programming software, the sensor, and all the necessary tools for seamless use by systems integrators such as Motofil H-Table, or Yaskawa ArcWorld.
Demonstrator Scenario
Nowadays, the adoption of robotic systems by SMEs from the metalworking industrial sector is still very low. One of the factors that contribute to this reality is the lack of intuitive robot programming interfaces. Offline programming use in robotic welding is still short, due to: (1) limited absolute accuracy of industrial robots, that require (2) complex sensing procedures, and finally, the lack of automatic path planning of robot trajectories. Typically, the programming time of medium-sized parts takes around 6 hours, meaning that for traditional lot sizes (<50) the robot has operational time below 50%. In many cases, companies simply end up preferring to produce those parts manually and use the robot only for large series.
The proposed system presents a significant reduction in both the required programming and cycle times of standardized robotic cells with large economic impacts in companies with small batch productions. A successful project will allow the broader adoption of robotic welding, through the removal of the major barriers listed above. The current project proposes a sensible application of these technologies to standard welding robotic cells, usually combining one or two robots and a welding positioner, to demonstrate the potential of a no-programming welding system.
Final Demo
Final Presentation
Intelligent robotics, outstanding productivity!
Furthermore: sarkkis.robotics@sarkkis.com
© 2025 SARKKIS-Robotics All Rights Reserved.