Intuitive programming for robotized welding applications.
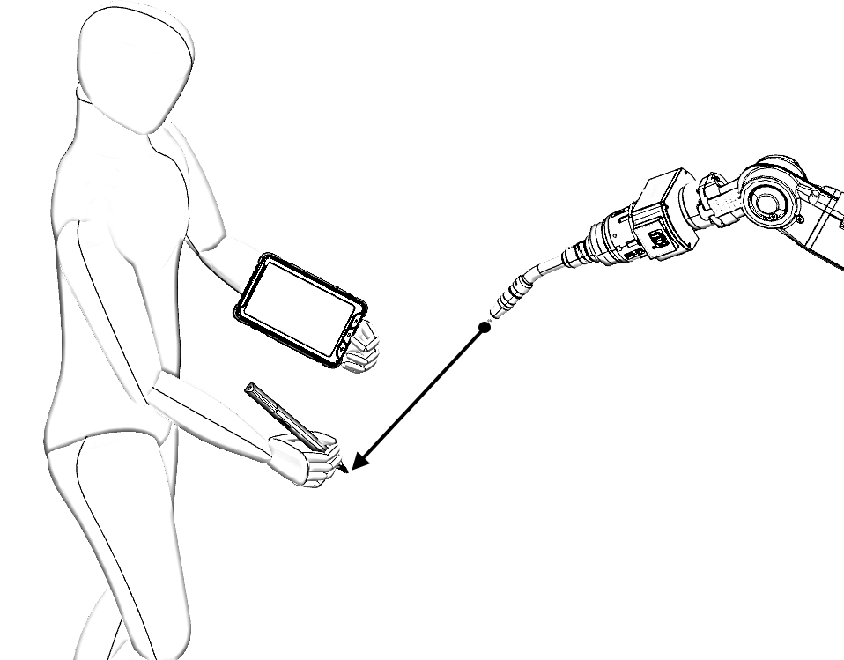
The main goal of this project is to develop a new industrial robotics programming technology based on a three-dimensional location of a pointing device, allowing the operator to clearly indicate the trajectories to be made by an industrial robot.

- Immediate Setup – use it in multiple robots;
- Simple use by a non-specialized operator;
- Decreases the inactivity time due to programming tasks;
- Efficiency improvement for small production series.
![]()
Project Form:
- Código do Projeto | NORTE-01-0247-FEDER-010916
- Objetivo Principal | Reforçar a investigação, o desenvolvimento tecnológico e a inovação.
- Região de Intervenção | Norte
- Entidade Beneficiária | SARKKIS – ROBOTICS, LDA.
- Data de Aprovação | 13-07-2023
- Data de Início | 28-04-2017
- Data de Conclusão | 28-10-2019
- Custo total elegível | 241.870,33 EUR
- Apoio financeiro da União Europeia |FEDER – 138.193,84 EUR
Project Description:
The main goal of this project is to develop a new industrial robotics programming technology based on a three-dimensional location of a pointing device, allowing the operator to clearly indicate the trajectories to be made by an industrial robot. This system will be complemented with an intuitive graphical interface, allowing it to be programmed by non-specialized technicians in robotics. In the past years, the difficulty in achieving desirable efficiency and productivity levels in small manufacturing series has been a known reality, with the programming costs of industrial robots representing a major obstacle to small-medium companies. In this context, the console-based programming methods have been unintuitive and slow and also the offline programming technologies have not been able to establish as an alternative, due to the generated trajectories constant reprogramming needs. This new solution has advantages over online console-based technologies in terms of making the programming process very explicit, in which the user indicates directly what he wants in the workspace, using an interactive way, saving the reprogramming costs of the industrial production lines and enhancing the opening for new markets and segments for industrial robots solutions.
Final Results
Intelligent robotics, outstanding productivity!
Furthermore: sarkkis.robotics@sarkkis.com
© 2025 SARKKIS-Robotics All Rights Reserved.